

Curved microtunnel success in the USA
Jul 2010
Dipl. Ing. Christian Röhrig, Dipl. Ing. Alexander Seilert, Nod Clarke Hackston of VMT GmbH
To the best of our knowledge the first curved microtunnel to be planned in the United States has just been completed. On May 19, 2010 The Metropolitan District Commission, Northeast Remsco Construction, the designers AECOM and the tunnel guidance specialists VMT GmbH celebrated the breakthrough of this major project for the US tunnelling industry in Hartford, Connecticut. VMT engineers explain how the company's guidance systems assisted in the success of the project.
-

Microtunnel takes a bend
- The first microtunnel project in the United States planned as a curved alignment was completed recently as part of the US$1.6 billion 'Clean Water Project' in Hartford, the capital of the State of Connecticut. The project is designed to reduce combined sewer and sanitary sewer overflows from the Hartford central sewer system and regional sanitary sewers and reduce nitrogen.
- Although much of the project involved trenchless technology, this section had been planned originally as an open trenched operation. However, the density of other utility services in the vicinity encouraged the contractor, Northeast Remsco, to suggest the microtunnel alternative for the 600ft (183m) drive. Detailed study of the obstacles on the route necessitated that the drive would need to be curved.
- Such was the complexity of these obstacles that the precise alignment was modified several times until the most suitable alignment was finalized.
- The machine used for the drive was the company-owned Herrenknecht AVND 1800AB MTBM equipped with a SLS Microtunnelling LT guidance system supplied by VMT GmbH.
- Curved guidance
For a curved drive the choice of guidance system is either a Laser Total Station System or a Gyro Navigation System. VMT offers both. Accuracy of 1in (25mm) in both horizontal and vertical required a Laser Total Station System and the SLS-Microtunnelling LT system from VMT was chosen.

-

Curved alignment
- This system is designed for the guidance of long distance and curved pipe jacking applications for pipe diameters of more than 40in (1,000mm). The main component of the system is a servo motorised Laser Total Station, which is mounted inside the tunnel on a special bracket and moves along together with the pipeline. The actual position of the laser total station is continuously calculated with help of the known as-built position of the already installed pipes.
- Even TBM drift is recognised and will not influence the accuracy of the system calculations.
- As the complete hardware of the SLS-Microtunnelling LT System is installed in the front part of the tunnel (the first 300ft (91.5m)) refraction does not influence the measurements for the vertical TBM position.
- The advantage of the Laser Total Station guidance system is the ability to determine continually the current position of the TBM and independent of drift or refraction. The robust, easy to handle tunnel-proven hardware and the user-friendly software, with permanent recording of all important drive data, allows quick familiarization of the system.

-

Set up of the VMT Laser Total Station
- The combination of a precise and reliable automatic navigation system and proper survey measurements guarantees that tolerance will be achieved from start to finish.
- In addition to the guidance system, VMT supplied an experienced engineer to oversee the operation of the machine which completed the 600ft (183m) drive through a curve of 1,359ft (415m) radius for a length of 160ft (49m) to complete this complex project in just nine days.
- The VMT InternetViewer to provide remote visualisation of navigation and machine data via the internet was supplied. All data of the actual TBM position, the TBM history, the TBM position in Google Maps and available machine data from the TBM were displayed in the internet browser and frequently updated. For such a challenging project this feature was a good solution for disseminating relevant information to all involved companies and parties. The machine and navigation data can also be displayed in web charts to analyze the jacking process.

-

The InternetViewer monitor in remote offices
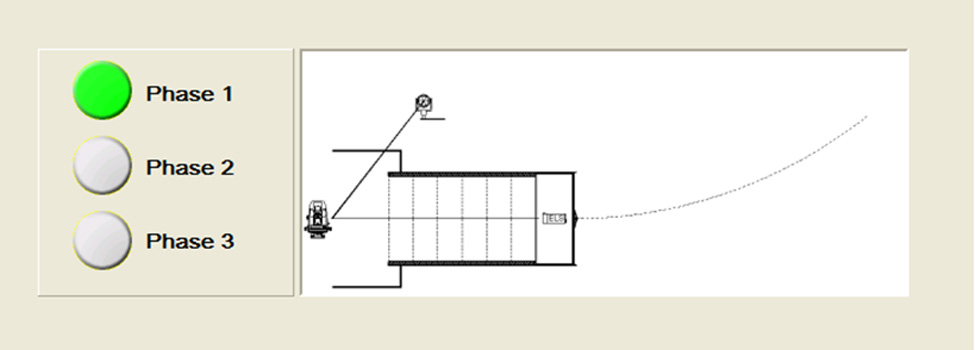
- From the moment the TBM started boring on the 10th of May, it was guided by VMT's SLS-Microtunnelling LT system. In the initial starting phase (Phase 1), the laser station, which comprises VMT's standard Leica TCA 1203plus motorized total station and includes an integrated diode laser mounted parallel to the visual axis and a sensor system that allows automatic targeting of prisms, was mounted on a purpose built measurement pillar between the jacking-pit thrust rams. For reference measurement a further pillar with a survey prism was installed with a reference prism outside the shaft.
- During excavation, the laser beam is maintained continuously on the ELS (electronic laser system) target and follows the TBM during the advance. The calculated values of position are displayed on the system's computer screen and stored in the database. The three-dimensional co-ordinates of the axis point in the ELS target unit plane are saved as the projected course of the TBM.
- The TBM itself produces a tunnel that determines with relatively good accuracy the position and level of the following pipes. This means that the positions measured for the TBM at a particular tunnel station will not change significantly for the following pipes - the position and level of all further pipes will be determined by the tunnel produced by the TBM. This assumption is called invariance of the pipeline and is the basis of all calculations in the SLS-Microtunnelling LT.

-

- The system normally remains in Phase 1 until the laser can no longer activate the target unit either due to distance or line-of-sight limitations. On this project this situation was reached after only two days when the tunnel reached a drive length of 210ft (64m). At that point, the heading was already 40ft (12m) into the curve and was approaching the position where the laser would no longer activate the target.
- The VMT engineer now mounted the Laser Total Station inside the tunnel to move along with the pipeline and continue the project in Phase 2. A bracket for the laser station, with automatic tribrach and inclinometer, was mounted directly onto pipe number 10, approximately 120ft (64m) behind the target, thus guaranteeing a line-of-sight to the target unit at all times. The automatic tribrach is used to eliminate roll at the laser station and maintain the total station permanently in a horizontal position. Any lateral inclination caused by the roll of the pipe is detected by an inclinometer positioned at the laser station and included in the calculations.
-

- Two additional brackets for the reference prisms were mounted five pipes ahead of the laser station. Their purpose was to allow measurement of the actual position of the advancing tunnel as directly in front of the laser station as possible, so that any variance between the measured position of the pipes and that of the theoretical position of the TBM at the same station can be determined.
- Finally the backsight reference prism was mounted on the measurement pillar in the shaft.
- As the laser station advances with the progress of the pipe, its position is known from the previously stored reference points, which are indexed via the chainage and corrected for any minor variation due to pipe roll pitch and yaw.

-

- Due to the very rapid advance rates on this project the interval for the full measurement cycle to check the positions of all the reference prisms was set at 1m.
- A single interjack station installed after the laser station as a contingency in case jacking pressures became too high was not utilized.
- In Phase 2, because of the fixed backsight target, the chainage of the laser position had to be ascertained independently of the inter-jack stations, and thus gave a more precise co-ordination of the reference points with respect to the longitudinal measurement.

-

Spot on breakthrough
- When the drive reached 405ft (123.5m) the backsight prism could no longer be measured from the laser station so the backsight prism was mounted in the tunnel together with its attendant inclinometer to allow roll of the pipes to be included in the computation.
- This commenced operation of the system in Phase 3. To ensure that an accurate chainage of the TBM is maintained, a distance measurement wheel is mounted on the pipes in the shaft.
- The guidance system was now running self-sufficiently under common conditions for the rest of the drive. Normally a full control measurement is carried out every 300ft (91.5m) to ensure that any accumulated errors are removed. However, due to the fact of the very small tolerance of 1in and the fast speed of advance, a quick measurement of the system area, from the TBM to the backsight prism, was done on a daily basis. This measurement was carried out while the tunnel crew was adding a pipe and as such, no delays were experienced.

- On day nine, the TBM scratched the receiving shaft and was recovered the next day. The breakthrough accuracy was less than ½ in (12mm) in both horizontal and vertical. Thus completing a very successful first in North America.
- First curved micro drive in the USA - TunnelTalk, June 2010
|
|
|
|
|
Add your comment
- Thank you for taking the time to share your thoughts and comments. You share in the wider tunnelling community, so please keep your comments smart and civil. Don't attack other readers personally, and keep your language professional.