
TunnelTECH Detecting boulders at TBM headings
Oct 2013
Bryan Walter and Michael A Mooney, Colorado School of Mines, USA
Ehsan Alavi Gharahbagh, The Pennsylvania State University, USA
Glen Frank and Michael A DiPonio, JayDee Contractors, Seattle, USA
-
As an alternative to existing methodologies for detecting boulders at TBM headings, a new boulder detection system prototype was developed for use on a portion of Seattle's University Link LRT metro project. The system uses accelerometers to monitor vibrations of the TBM bulkhead in an effort to determine where geological changes occur along the tunnel alignment.
- TBMs are robust, multi-million dollar machines, but their performance is directly related to their uptime and the reliability of their systems, a significant portion of which is attributed to the ability of the TBM operator to react to underground environmental changes.
-

Boulders in the grizzly bars of a soft ground TBM
- While there have been several methodologies devised for detecting boulders in the ground ahead of a TBM heading, such as seismic detection[1] and Ground Penetrating Radar (GPR)[2], none have proven to be as effective as an experienced operator who can 'feel' the collision with a boulder. This is problematic for two reasons. First is that TBM manufacturers are relocating the operator's console away from the cutter head, and therefore operators cannot sense changing geological conditions. Secondly, it relies on the ability of the operator to sense the event in addition to his many other duties.
- A new system for detecting boulders has been developed that monitors the vibration of the TBM bulkhead. Accelerometers mounted on the bulkhead measure the amplitude of vibrations transmitted from the cutterhead to identify boulder patterns. This monitoring serves two purposes. It alarms the operator of potentially damaging conditions, such as an upcoming boulder in the cutting path of the TBM, and it acts as a documentation system that can be used to supplement a Geotechnical Baseline Report (GBR).
- A prototype of the system was developed in collaboration with JayDee Contractors and was trialed on a portion of the contractor's University Link LRT metro project contract in joint venture with Frank Coluccio Construction Company and Michels Corporation. The contract included excavation of twin running tunnels of 3,880ft (1,183m) in length.

-

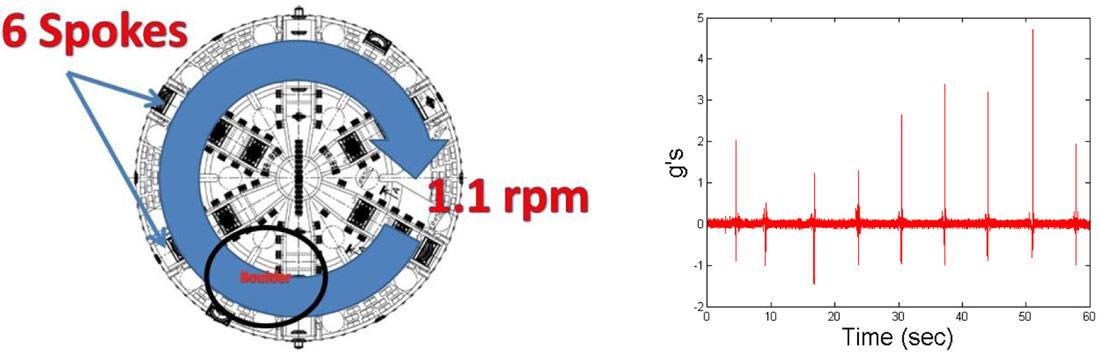
Fig 1. Cutter head spoke visual and hypothetical boulder signature
- The Seattle area has a complicated geological history: six major glacial events have happened during the last two million years in this area, and non-glacial erosion and depositional periods have also occurred. Various interglacial and glacial events have resulted in a very complex soil structure. Given these factors, it was estimated that 74 boulders ranging in size from 1ft to 6ft (up to 2m) would be encountered in the northbound running tunnel of the contract and 66 boulders ranging from 1ft to 3ft (up to 1m) would be encountered in the southbound tunnel.
- TBM operators either sense a TBM interaction with a boulder as a vibration or hear it as a change in the normal operating sound. In the modern world of transducers, both of these can be measured by an accelerometer or a microphone. The challenge is in encapsulating the response of the operator in an algorithm. Considering what the operators sense, two things are hypothesized to occur. First, as the cutterhead rotates and the cutters successively strike a boulder, a pattern will materialize that should correlate to the number of teeth striking the boulder and the rotation speed of the cutterhead. Secondly, the level of vibration will be higher than the nominal operating level. As an example, if the cutterhead consists of six spokes rotating at 1.1 rev/min, the expectation would be to see an impulse about every nine seconds (Fig 1).
-

Fig 2. Boulder detection system architecture
- With these constraints in mind, two options were considered. Adding an analog card and accelerometers to the TBM's PLC was an attractive first option because it was an integrated solution. However, the sampling rates and numerical processing options of the PLC were not flexible enough for a prototype system. Assembling a custom data acquisition system from off the shelf components was ultimately the chosen option and proved to be the most flexible.
- The boulder detection system was comprised of three main components: a computer with custom software, an analogue input or DAQ module and a tri-axis accelerometer. These were then connected to the contract management network and run as a server application. The network connection enabled the boulder detection system to write directly to an SQL database and for multiple remote observers to connect to the system (Fig 2).

-

Fig 3. Location of accelerometers
-

Data acquisition unit installed on the TBM bulkhead
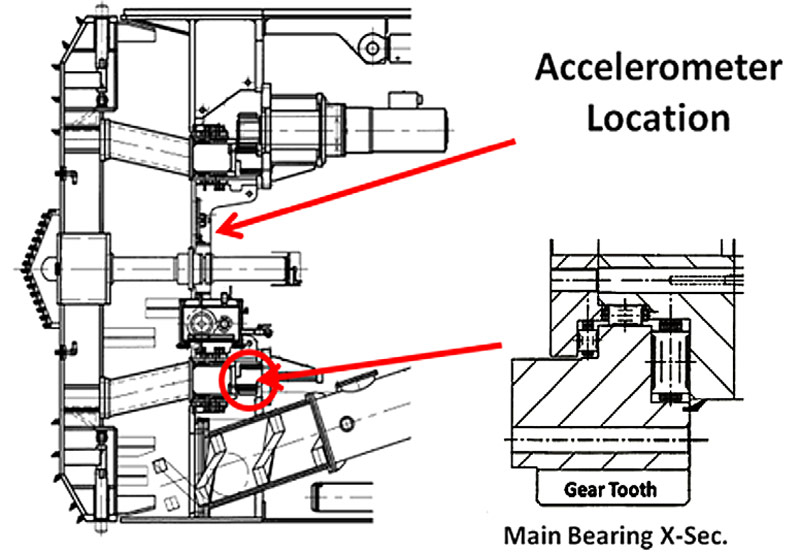

- A single tri-axis sensor was constructed from two dual-axis MEMS-type accelerometers. This arrangement was chosen to investigate if there was a dominant direction of the induced vibration. The sensors were rated at a g-force of ±18g (±176.6m/s2), had a 100mV/g sensitivity and were low-pass filtered with a first-order resistor-capacitor (RC) filter at approximately 50Hz. A higher bandwidth would have been preferable and will be employed in the future. The accelerometers were mounted on the bulkhead of the TBM, near the main bearing, because it is a very structurally stiff location and virtually all the vibrations must travel from the cutterhead through the bearing and into this supporting member (Fig 3).
- The accelerometers were sampled at 200Hz with a custom application that provided a real-time graph of vibration levels and an indicator that alerted the operator of vibration levels that exceeded a programmable threshold. In addition, there were fields that allowed alteration of program parameters such as sampling rates, trigger levels and file logging.
-

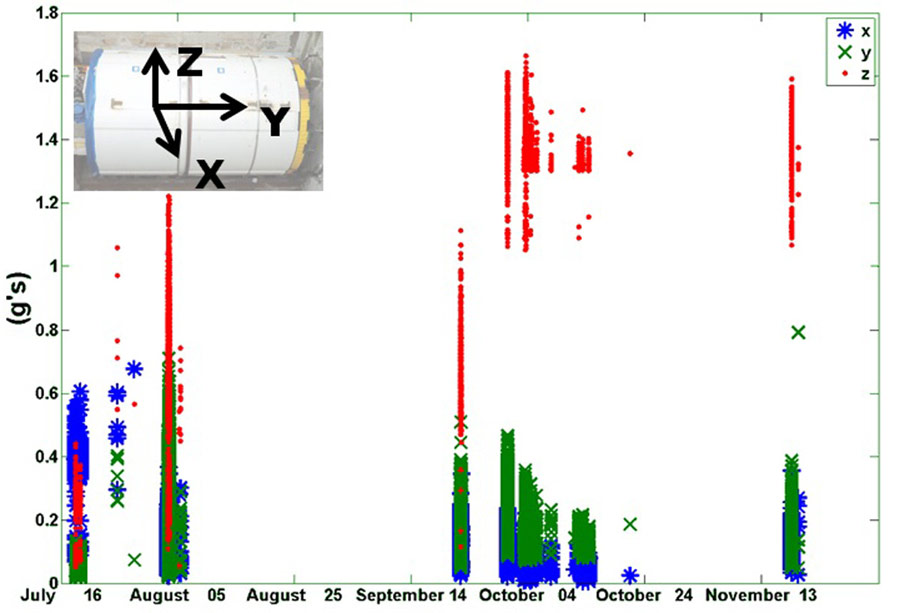
Fig 4. Sampled data from northbound advance
- The application also performed the following background tasks: logging time stamped waveform data at user configurable intervals, writing threshold events to the main SQL database when thresholds were exceeded and hosting remote connections.
- The system was in operation for much of the northbound running tunnel drive of Contract U-230. The system collected approximately 20,000 'events' from mid-July to mid-November 2011, where the events are time-stamped values of the x, y and z vibration levels that have exceeded a specified threshold (Fig 4). These events tended to be triggered in groups, which is indicative of the changing geology along the tunnel alignment.
- Focusing on the data associated with particular areas allows distinct peaks to emerge from the data set (Fig 5). These peaks demonstrate the ability of the system to capture events and delineate them in time. The spikes are therefore evidently from the cutterhead striking erratic features in the geology.
-

Fig 5. Time delineated view of event
- This method of boulder detection is promising, but there are challenges to overcome. With more analysis, some system improvements and the combination of other TBM parameters (such as rev/min, cutterhead rotation and advance rates), it will be possible to derive a relationship between these measured peaks and actual occurrences of boulders.
- For the next drive in the southbound running tunnel, the system was upgraded to an embedded platform and its operation was set up to be automatic. More sensors were also used for the southbound running tunnel, and their capabilities were upgraded. The data sampling rate was increased to 2.5kHz/channel. This upgrade corrected for the under sampling of the waveforms. As few as two data points were attempting to characterize a cycle of the response under the prototype system used on the northbound running tunnel drive.
- Overall, the system in operation proved to be flexible, but there is further potential for development. Among other challenges, the system needs to operate without user intervention. It also needs to be consolidated into a single device instead of being split between a computer and a data acquisition module. In its current state, if the system is not started by an operator or if communication is lost, no data is collected. The upgraded system used on the southbound TBM drive has resulted in a great amount of additional data, which is currently being analyzed for a PhD thesis by co-author Bryan Walter.

-
1. Kneib, Kassel & Lorenz, 2000. Automatic seismic prediction ahead of the tunnel boring machine.
First Break, 18(7), 295–302. Wiley Online Library.
2. Frank & Daniels, 2000. The use of borehole ground penetrating radar in determining the risk associated with boulder occurrence. North American Tunneling 2000. Rotterdam, Balkema.
More details available in the conference paper presented at the UCA NAT Conference held in Indianapolis in
June 2012.
-
Predicting rock conditions ahead of the face - TunnelTalk, September 2012
Mobilization of Seattle's U-Link extension - TunnelTalk, July 2010
U-Link prepares to receive its TBMs - TunnelTalk, March 2011
|
|
|
|
|
Add your comment
- Thank you for taking the time to share your thoughts and comments. You share in the wider tunnelling community, so please keep your comments smart and civil. Don't attack other readers personally, and keep your language professional.