
- Current
After three years, a number of potentially groundbreaking TBM technologies are approaching readiness for testing in live underground situations.
The developments come as part of a collaborative project known as New Technologies for Tunnelling and Underground Works (NeTTUN), an ambitious project that fuses together a group of 22 laboratories, research centers and commercial enterprises, spanning nine European countries. Over five years, ending in 2017, industry experts will address key scientific and technical aspects of tunnel construction to respond to the increasing societal demands and the huge capital investments related to underground development.

NeTTUN falls under the European Commission’s (EC) Seventh Framework Programme for Research, Technological Development and Demonstration (FP7 2007-2013). The project was initiated and is managed by French TBM manufacturer NFM Technologies, with Dr Thomas Camus at the helm.
An important development by NeTTUN is a combined ground prediction system for TBMs, known as TULIPS. The system is designed to facilitate fast, frequent and effective detection of ground conditions ahead of the excavation face. At its heart is electromagnetic radar technology – developed by Italian radar manufacturer IDS – and a seismic source and sensor network developed by Dutch-based MI Partners.
“We have been through the development of the radar antennae in parallel with the radar software development,” said Camus. “We have finally selected a new design of antennae that will cope with size constraints at the cutter head. We have also solved the problem that arose due to the presence of the metallic mass of the cutter head itself.” IDS is currently fine-tuning two antennae for a TBM that has been manufactured by NFM Technologies. This TBM will test the concept in real time as it excavates the first stretch of the 57km-long Lyon–Turin railway tunnel, starting early 2016.
The hardware aspect of the seismic system has already been completed and tested. MI Partners, in partnership with the Technical University of Delft, has designed a new type of seismic source and a sensor that includes geophones, which will also be installed on the TBM cutterhead. “The trick is to protect this piece of equipment when the TBM is excavating,” said Camus. “The equipment protrudes in front of the TBM slightly as it takes measurements, but during excavation itself, everything will retract. This is quite innovative.”
Meanwhile, the software for the system is under development, mainly at Delft University. Once completed it will automatically process the data collected by the radar and seismic sensors, thereby creating a detailed 3D-image of the ground ahead of the excavation face. “This fully automated system is totally new, at least in the tunnelling industry,” said Camus. Another team, from the University of Leeds, is working on combining and simultaneously interpreting the data from both the radar and the seismic sensors. “In the future a third system could even be added,” explained Camus, “although this is not something that is planned at the moment, we want this to be an open system.”
Another important topic addressed by the NeTTUN development teams is the lifespan of drag bits, an area that Camus himself was already working on before the establishment of NeTTUN.


“It surprised me that no one has really looked at this before. Much industry attention is paid to reducing the life cycle cost of disc cutters, but not of drag bits. Maybe this is because disc cutters are more expensive, but in the end replacing drag bits can cost more time and money than replacing disc cutters because TBMs have many more drag bits than disc cutters.”
Tallinn University of Technology, Estonia, was tasked with developing a new configuration of hard metals that would improve quality and durability. “Already they have produced two better-performing metals than the ones we use as a reference,” said Camus. The research team has also been investigating the optimal shape of drag bits. “We are trying to better understand the process of wear by simulating and researching the interaction between a drag bit and the ground that is being excavated.” To help with the simulations and the performance assessment, new test systems have been built at the Tallinn University of Technology and the tribology lab of the École Centrale in Lyon. With these new systems, the actual wear rate of the new materials can be accurately measured in a controlled environment.
With the development of an automated system for replacing disc cutters in conditions where hyperbaric interventions would normally be necessary, NeTTUN aims at improving both the safety and efficiency of TBM maintenance works. Currently, specialist hyperbaric diving teams must work in a compressed air environment if the pressure ahead of the face demands it, using hoists to carefully replace worn out disc cutters that can each weigh more than 200kg. This is in itself a risky, difficult and time-consuming operation. One way that the health and safety risks can be reduced is to work behind a closed cutterhead so that maintenance teams can enter at normal pressure. This is not an ideal solution, however, and NetTUN is looking into alternatives. “Working behind a closed cutterhead is still complex, and needs larger cutter heads that increase costs dramatically,” said Camus. “We looked at this technology and thought we needed to do something that fits the targets set by the European Commission, which means working more with automated systems. A robot seemed like an obvious alternative.”
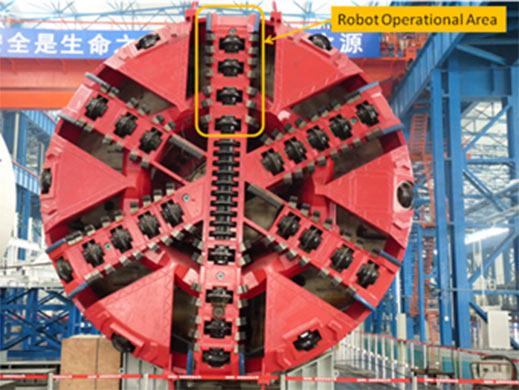
NeTTUN researchers started the design process from scratch, redesigning the disc cutter mounting device so that they could be handled by robot arms. A new mounting system has now been developed for disc cutters and for drag bits, one that can be operated by a single robot arm. Camus explained: “There was an idea to use off-the-shelf robots, but considering the weight of the items we are working with, you would end up with an absolutely huge robotic arm.
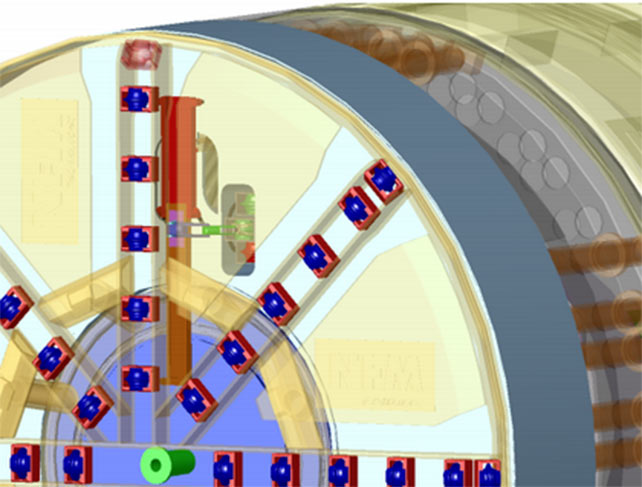
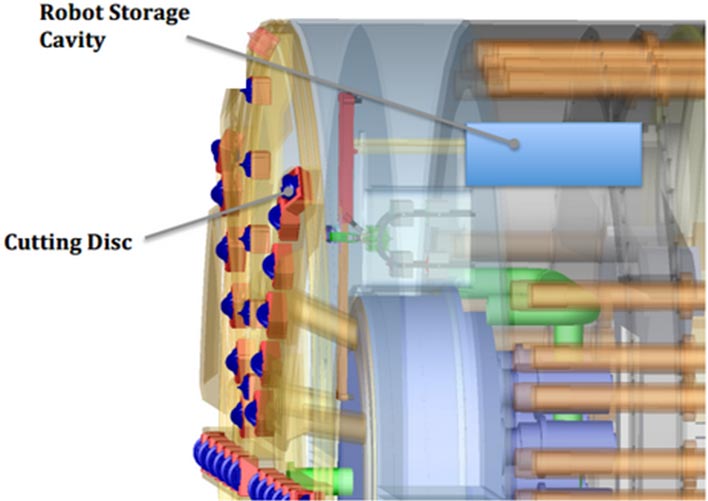
“This solution would have been very expensive, and it would have been very difficult to position a huge arm inside a TBM shield; so the working group designed a completely new hydraulic and compact robotic arm that will be placed behind the sealed bulkhead and be deployed to reach the cutterhead when an intervention is required.
“The design phase of the arm is completed and we have already received the first set of hydraulic equipment,” said Camus. “We have also made a test bench – a table stand on which the robot and a section of cutterhead will be placed, exactly as on an actual TBM.”
DFKI, the German research center for artificial intelligence, is developing the software for the robot system. According to Camus, the robotic system will be assembled by the end of this year in the NFM Technologies factory in France. “We are confident of having a prototype available for demonstration and ready for integration in a TBM in the first quarter of 2016.” The automated system is expected to eliminate the necessity for 80% of human interventions at the cutter head and reduce the number of related worker accidents by a factor of five.

Another requirement of the European Community that is funding the research was to address the maintenance and refurbishment of tunnels. NetTUN set out to develop an automated decision support system that will assist maintenance experts in defining the appropriate strategy in terms of tunnel inspections and maintenance operations.
The research is linked to a practical case brought in by French railway operator SNCF. “They have a huge number of rail tunnels that were built almost a century ago, and more than 80% of them are really old,” explained Camus. “The tunnels have been repaired in different phases but SNCF rarely repairs a tunnel completely, only the locations where it is degraded.”
Currently it is a challenge for SNCF to make decisions regarding maintenance works when it operates such a wide range of tunnels built using an array of construction methods, and keeping track of which ones have been repaired, and how, when, and where exactly. Another question SNCF faces on a daily basis is how a tunnel is going to degrade in the future. “The experts know the condition of each tunnel, but they have to predict what is going to happen in the future and decide how urgent it is to repair any particular tunnel,” said Camus. “While discussing this it became obvious that we needed artificial intelligence to deal with the data. SNCF has a huge amount of information coming in from inspection teams and also from the construction data packages.” The automated support system would need to interpret all this data and correlate the current situation with expert knowledge.
The University of Leeds in the UK, which was already involved in the AI processes for the ground prediction system, was invited to develop the software. They started with interviewing SNCF experts, trying to understand how they handle their work, and how they use the data to manually make predictions. In the next step the team analysed all tunnel factors that have an influence on the degradation process – such as the construction techniques and materials used, the ground composition and the presence of surrounding water. “This formed a knowledge base, an ontology, from which they could implement the decision-making software using all these influencing factors as parameters,” explained Camus. The goal of the software is to help the experts set up a tunnel maintenance strategy by summarising the situation and predicting which tunnels need to be prioritised.
The first part of the software, called PADTUN (Fig 1), has been completed. A set number of tunnels for which SNCF experts have the situation very precisely analysed, were used to feed the knowledge database and function as a reference. The University of Leeds is now working on the prediction part of the software. “We are probably going to extend the duration of this work package. This way we can develop a product that can be used by other tunnel operators as well, not just the SNCF,” said Camus.
All in all, NeTTUN will provide a significant step in automating the tunnelling industry. “A number of actors share a dream of having TBMs underground with the crew safely in offices at the surface,” said Camus. “I think this is not so far from being feasible. Of course there is a lot of work to be done, but when you look at space technology, for example, incredible things are done by automated or remotely controlled systems. But it is not just about automation, the term 'remotely' is very significant in these developments as well.”
|
|
|
|
|
